Advertorial
Architektonická súťaž Internorm 2026
Súťažná prehliadka vstupuje do ôsmeho ročníka.
Projekt Rakyta prináša novú podobu mestského bývania v Bratislave
K vyššiemu komfortu bývania prispievajú aj okenné systémy REHAU SYNEGO, zvolené pre svoje tepelnoizolačné vlastnosti,...
Priestorová sloboda: Nová generácia výklopno-kyvných strešných okien
VELUX prináša dostupnejšie výklopno-kyvné strešné okná GNL a GNU, ktoré rozširujú možnosti práce so svetlom, výhľadom...
SAINT- GOBAIN Architecture Student Contest 2026
Výsledky národného kola obľúbenej študentskej súťaže.
Skryté zárubne: Minimalistický prvok vo vývoji moderných interiérov
Objavte riešenia Dorsis, ktoré spájajú minimalistický vzhľad s vysokou variabilitou, funkčnosťou a spracovaním na mieru.
Dom s dvomi Bytmi, Budapešť
Súčasné bývanie v prostredí budapeštianskej vilovej štvrte.
Výmena okien: najrýchlejšia cesta k úsporám energie
Moderné strešné okná ponúkajú pohodlné ovládanie aj lepšiu ochranu domácnosti počas celého roka.
Dvere DIVA – interiér nie je miesto, interiér je pocit
Rad interiérových dverí DIVA DOOR od spoločnosti J.A.P. ponúka čistý dizajn a variabilné riešenia pre súčasné interiéry.
Inovácie a komplexné 360° riešenia: Rad noviniek pre profesionálov z odvetvia okenného priemyslu
REHAU Window Solutions na veľtrhu Fensterbau Frontale 2026
Pracovné dosky Kronodesign® Slim Line: ultratenký profil, ktorý v projekte pôsobí „monoliticky“
Sortiment Slim Line zahŕňa pestrý výber dekorov a textúr.
95 rokov Internorm: 30 miliónov okien a dverí z Rakúska
Európska značka okien oslavuje jubileum: za 95 rokov sa vyvinula na najväčšiu medzinárodne pôsobiacu okennú značku a inovačného...
Pozvánka na 2. ročník stavebného veľtrhu BigMarket na Slovensku
Na podujatí sa predstaví až 37 vystavovateľov - popredných dodávateľov stavebných materiálov a inovácií s prezentáciou...
Hotel Hirschen Spa House, Rakúsko
Novotvar v prostredí alpskej obce.
Vytvorte si kúpeľňu snov: dizajnové riešenie od značky hansgrohe
Hansgrohe - prémiová značka kúpeľňových riešení, ponúka nadčasový dizajn, technickú precíznosť a udržateľné inovácie...
Okná Internorm za minuloročné ceny + hliníkový kryt zdarma!
Využite špeciálnu akciu Internorm: okná za minuloročné ceny a hliníkový kryt úplne zadarmo. Ponuka je časovo obmedzená!
Kinetická a responzívna architektúra – pohyb telesa v priestore


Doc. Ing. Ľudovít Kolláth, PhD.
Strojnícka fakulta STU v Bratislave, e-mail:ludovit.kollath@stuba.sk
Mgr. art. Júlia Kolláthová, ArtD.
Vysoká škola výtvarných umení v Bratislave, e-mail: kollathova@vsvu.sk
Úvod
Donedávna sme si pod spojením architektúry a pohybu predstavovali pohyb užívateľa v rámci alebo okolo architektonického priestoru. S rozvojom počítačových technológií v 90. rokoch sa otvorili nové technologické možnosti, vznikli animované formy, generatívna a parametrická architektúra. Pojem animovanej architektúry sa viaže k menu Grega Lynna, ktorý chápal architektúru ako objem, na ktorý pôsobia rôzne sily, ktoré ho formujú. Pomocou technológií vypožičaných napr. z automobilového priemyslu dokázal tento proces znázorniť, zanimovať. Výsledkom bola forma, ktorá niesla na sebe stopy pôsobiacich síl. Aj parametrická architektúra dokáže pomocou počítačových technológií znázorniť premenlivosť formy v závislosti od zadaných parametrov.
Pod architektonickým priestorom si väčšinou predstavujeme priestor pre pohybujúceho sa
človeka alebo pre viacerých ľudí. S rôznymi formami pohybu sa stretávame v prírode, samotná príroda okolo nás tvorí cyklicky sa opakujúci systém so striedaním sa denných častí a ročných období. Prečo by na to architektúra nemala vedieť reagovať a prispôsobovať sa týmto zmenám? Alebo zmeneným potrebám užívateľov? Samozrejme takisto, ako ľudské telo potrebuje kosti, kĺby, svaly a nervy na jednoduchý pohyb ruky, takisto je s kinetikou neodlučiteľne prepojená technologická časť budov. Možno práve táto mechanická časť by mohla predstavovať riešenie na problém presadenia komplexných digitálnych návrhov do reálneho fyzického sveta. Pri komplexných neeuklidovských generovaných tvaroch dochádza totiž často ku kolízií počítačových možností a stavebnej reality, komerčných staviteľských postupov. Mnohí architekti sa nechali inšpirovať dopravnými prostriedkami, autami, lietadlami, vlakmi, loďami. Le Corbusier považoval dom dokonca za „stroj na bývanie“. Mechanické časti ako ozubené kolieska, koľajnice, pohyblivé spoje, pánty a pod. dokážu zabezpečiť pohyblivosť v rámci architektonických štruktúr. Škála riešení môže byť veľmi rôznorodá, čo sa týka mierky a komplexnosti. Premiestniteľný a pohyblivý môže byť celok alebo väčšia či menšia časť celku. Niekedy sa kinetické prvky objavujú v rámci interiéru ako posuvné steny, inokedy na fasáde ako tieniace prvky.
Kinetická architektúra rieši architektonické diela s pohybmi jednotlivých ich častí. Je veľmi úzko spojená s responzívnou architektúrou. Totiž, aby mohlo niečo reagovať na podnety prostredia, sú k tomu potrebné rôzne formy pohybu [5].
Neustále prenikanie IKT (informačné a komunikačné technológie), riadiacej techniky nám otvára nové a nové možnosti automatického riadenia týchto pohybov. Vyžaduje si to však sofistikovanejší prístup k riešeniu problému. Už nám veľmi často nestačí napr. riadiť a vymedziť rozsahy pohybov pomocou napr. koncových spínačov. Využíva sa automatické riadenie so spätnou väzbou, napr. polohovou (obr. 1) [1].
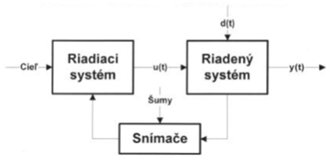
Pri technickej realizácii lineárneho alebo rotačného pohybu telesa sa objavujú otázky presnosti a opakovanej presnosti polohovania telesa. Základný problém je v tom, že kinematické štruktúry (mechanizmy, kinematické dvojice, prevody...) nikdy nie sú dokonale presné. Strojárske súčiastky sa vyrábajú s predpísanou toleranciou rozmerov a v prevodoch musí byť vôľa – aj keď minimálna. Tieto „poruchy“ sa eliminujú pomocou snímačov (polohy) v spätnej väzbe riadenia.
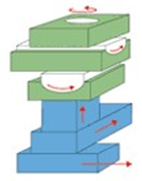
Pohyb telesa v priestore
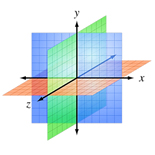
Pohyb telesa sa určuje vzhľadom na iné teleso, resp. vzhľadom na súradnicový systém (obr. 2), ktorý je definovaný na druhom (vzťažnom) telese. Na voľbu súradnicového systému a umiestnenie jeho počiatku v podstate nie sú žiadne pravidlá. Prichádzajú do úvahy napr. kartézske, sférické, cylindrické súradnicové systémy. Najčastejšie sa však volí pravouhlý pravotočivý – kartézsky súr. systém (obr. 3) [2, 3]. Ak sa teleso pohybuje, menia sa jeho súradnice.
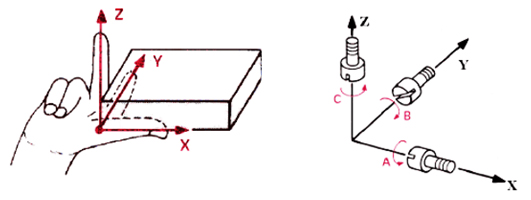
Teleso v tomto súradnicovom systéme môže vykonať priamočiare pohyby (translačné) okolo osí X, Y, Z a rotačné pohyby (A, B, C) okolo týchto osí.
Hovoríme tomu, že teleso v priestore má 6 stupňov voľností.
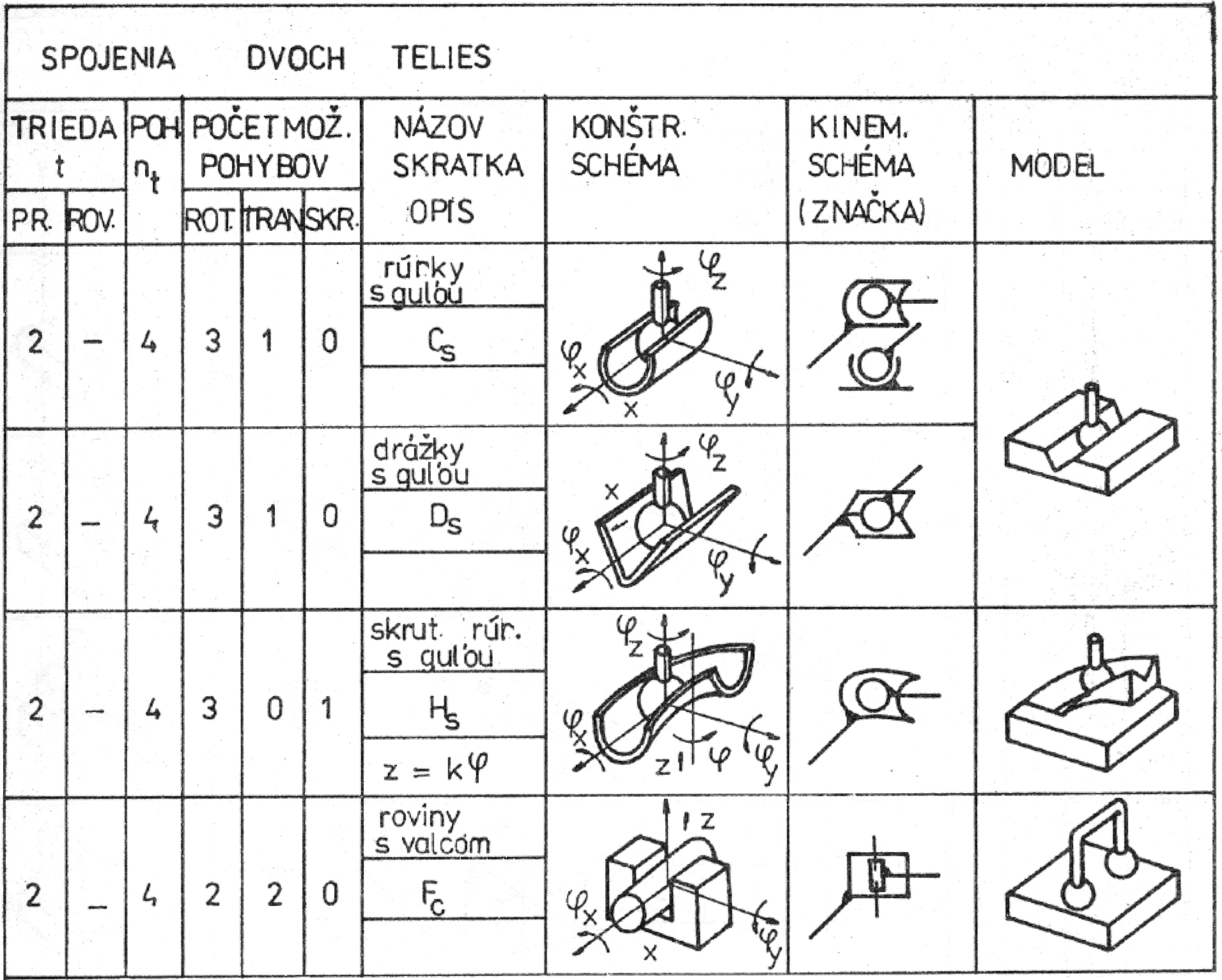
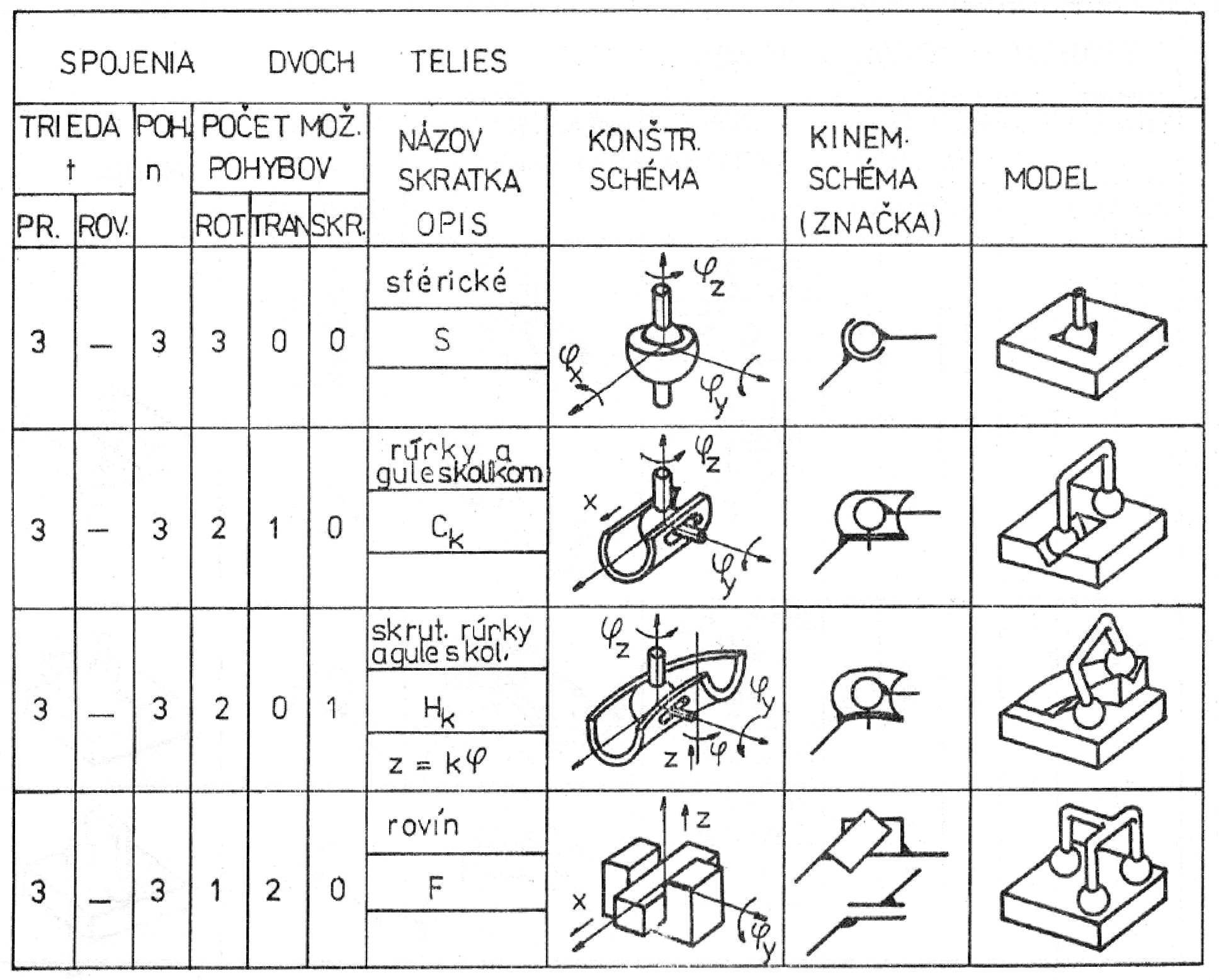
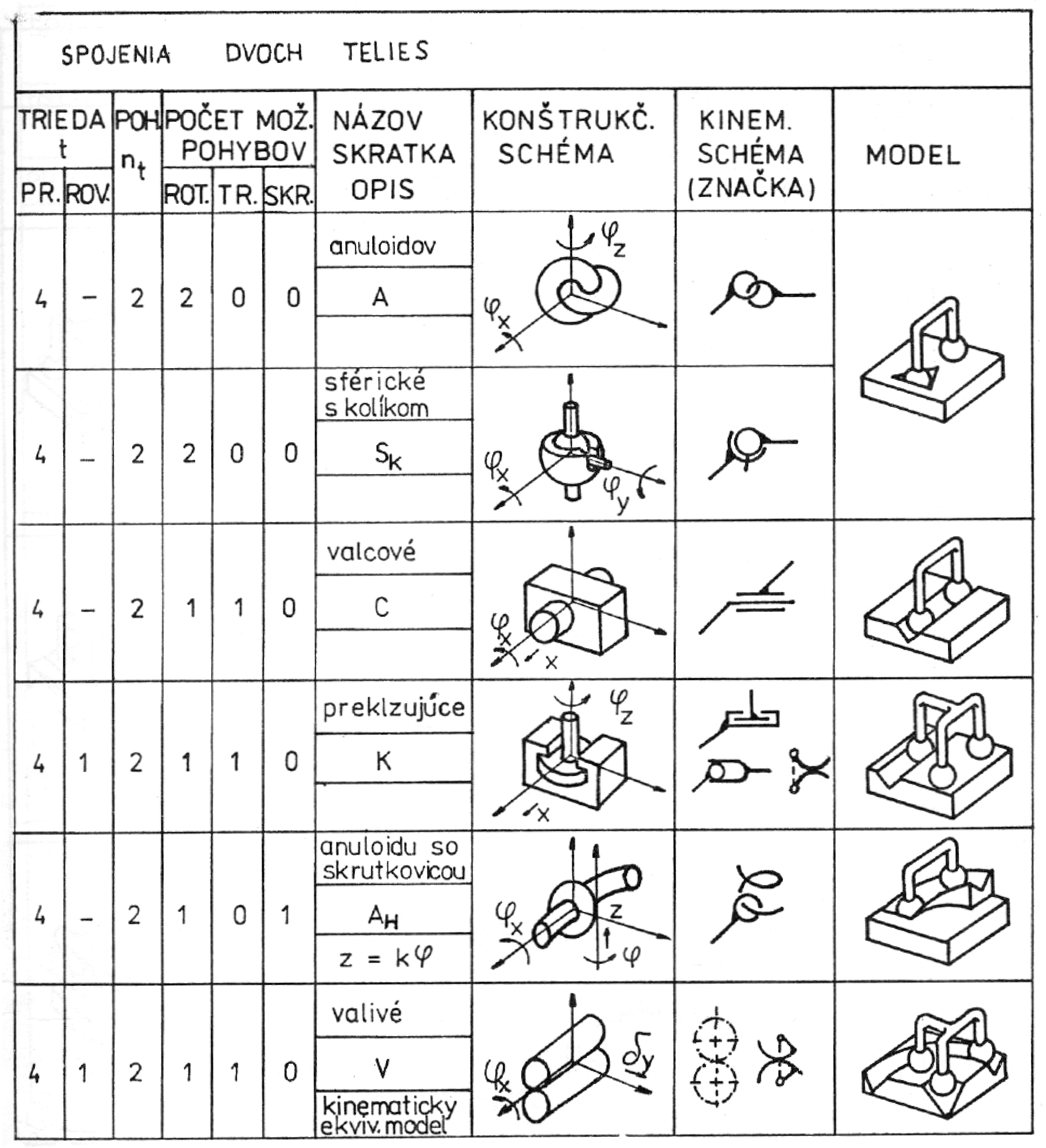
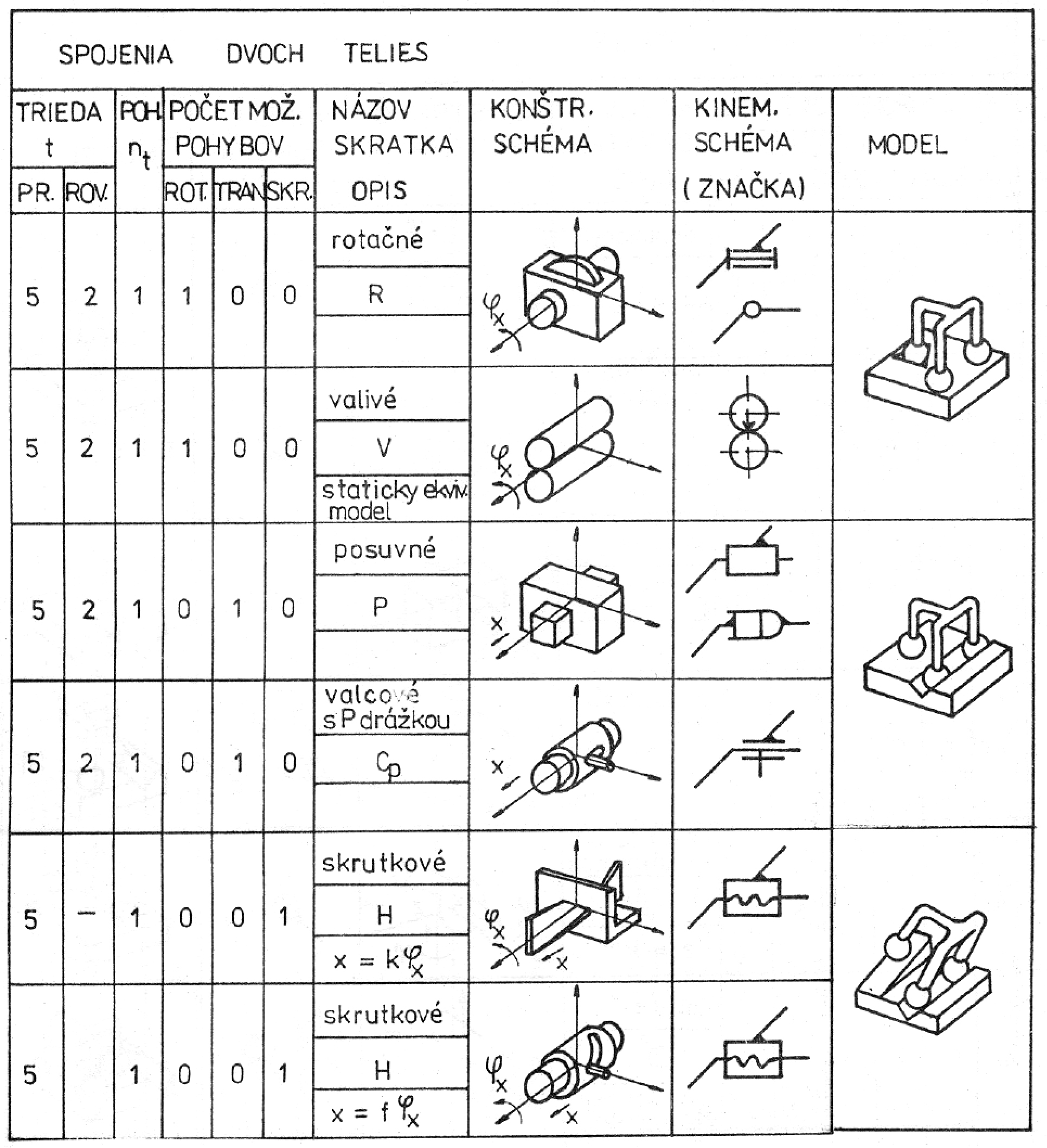
Postupným odoberaním týchto stupňov voľností dosiahneme, že teleso bude vykonávať len také pohyby, ktoré sú nutné k riešeniu konštrukcie kinetickej architektúry. Možnosti pohybu telesa závisia od spojenia (väzba) s druhým telesom, t. j. teleso musí byť prispôsobené na spojenie s druhým telesom. Toto prispôsobenie sa nazýva voľná poldvojica. Kinematická dvojica je potom vytvorená spojením (pohyblivou alebo nepohyblivou väzbou) dvoch voľných poldvojíc. Kinematické dvojice sa delia do tried. Trieda kinematickej dvojice je daná počtom stupňov voľnosti odobraných kinematickými väzbami. V tab. 1 až 4 sú schémy označenia vybraných dvojíc [4].
Záver
V kinetickej architektúre sa realizujú lineárne a rotačné pohyby, ktoré sa najčastejšie spájajú sériovo (sériová kinematická štruktúra), obr. 4.
Ak sa však vzdáme hlboko zakoreneného karteziánskeho súradnicového systému, môžeme si zostaviť aj paralelnú a hybridnú kinematickú štruktúru. Musíme však počítať aj s vyššími nárokmi na riadenie systému.
Poďakovanie
Tento príspevok vznikol vďaka finančnej podpore MŠVVaŠ projektu KEGA 003VŠVU-4/2020 Zvýšenie úrovne edukačného procesu v oblasti kinetickej architektúry.
Literatúra
[1] Velíšek, K., Košťál, P.: Mechanizácia a automatizácia, Vydavateľstvo STU v Bratislave, 187 s. 2006, ISBN 978-80-227-2753-2
[2] Buur, J.: A Theoretical Approach to Mechatronics Design, Institute for Engineering Design, TU of Denmark, Lyngby, 1990, 126 s.
[3]. GOUBEJ. M, ŠVEJDA. M, SCHLEGEL M. 2012. Úvod do mechatroniky, robotiky a systémů řízení pohybu. [online]. [cit. 2021-05- 25]. Dostupné z:
http://home.zcu.cz/~msvejda/URM/materialy/Uvod%20do%20mechatroniky.pdf
[4] KOLÍBAL, Zdeněk a Radek KNOFLÍČEK. Morfologická analýza stavby průmyslových
robotů. Košice: Vienala, 2000, 178 s.: il. ISBN 80-88922-27-5.
[5] Schumacher, M., Schaeffer, O., Vogt, M. M.: Move, Architekture in Motion – Dynamic Components and Elements, Birkhäuser Verlag AG, Basel 2010, Printed in Germany, ISBN 978-3-7643-9986-3
Súvisiace články
